Small, light-weight flying robots such as the 20-gram DelFly Explorer form an extreme challenge to Artificial Intelligence, because of the strict limitations in onboard sensors, processing, and memory. I try to uncover general principles of intelligence that will allow such limited, small robots to perform complex tasks.
Vision is a prime sense for both animals and robots. I create efficient vision algorithms for robot control and navigation.
Fruit flies are able to fly, avoid obstacles, navigate, and socially interact with each other with only a 100,000 neurons. Insects are a rich source of inspiration for elegant, efficient AI.
As Rodney Brooks said: "Simulation is doomed to succeed" - I focus on problems actually faced by robots in the real world.
Please click below to have a look at a selection of my current research projects.
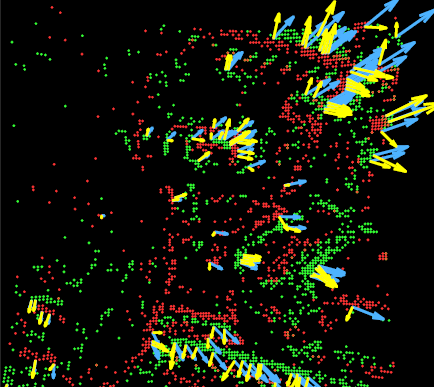
We have developed a new theory on how flying drones and insects can estimate the gravity direction. Whereas drones typically use accelerometers to this end, the way in which flying insects do this is shrouded in mystery, since they lack a specific sense for acceleration. In an article published today in Nature, scientists from TU Delft, […]

Insect-inspired AI for autonomous robots Small autonomous mobile robots, such as drones, rovers, and legged robots, promise to perform a wide range of tasks, from autonomously monitoring crops in greenhouses to last-kilometer delivery. These applications require robots to operate for extended periods while performing complex tasks, often in unknown, changing, and complicated environments. In an […]

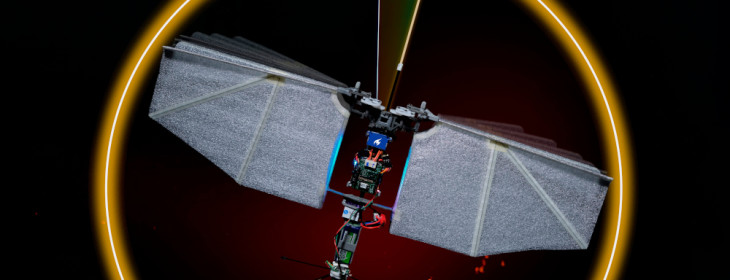
We have teamed up with Royal Brinkman and start-up Mapture to develop AI and drone technology for greenhouse monitoring. These lightweight drones are able to take off, navigate without GPS, collect critical data, and land in a box fully autonomously. Through the data collected, greenhouses could monitor the health and growth of plants, and detect […]